Single Incision Free Motion (SIFM)
For my graduate research, I published three papers (two conference papers and one journal paper in ASME) and was awarded a patent. This section highlights those publications along with the patented work.
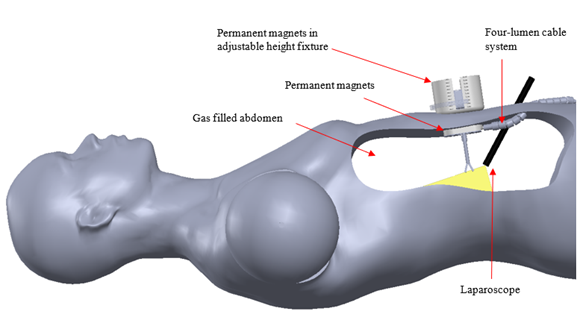
My primary focus was developing the Single Incision Free Motion (SIFM) laparoscopic surgical device, taking it from an initial concept through design, analysis, and a working prototype. I also led and mentored two undergraduate students throughout the project.
The work involved a combination of mechanical design, magnetostatic analysis, and medical robotics research, with an emphasis on creating a functional and testable system for minimally invasive surgery.